Caderno Renováveis – Outubro de 2016
Por Isaac Medeiros, Francisco Fontes, Cleiton Barbosa, Samara Valcacer, Robson Sanabio e Valter Dantas*
 No mundo em que vivemos, há uma grande demanda por energia elétrica e, consequentemente, de energias renováveis, as quais vêm ganhando espaço considerável, tendo em vista a iminente escassez dos combustíveis fósseis e seus impactos ambientais.
No mundo em que vivemos, há uma grande demanda por energia elétrica e, consequentemente, de energias renováveis, as quais vêm ganhando espaço considerável, tendo em vista a iminente escassez dos combustíveis fósseis e seus impactos ambientais.
Uma das formas mais comuns de conversão direta dessa energia em eletricidade é através de células fotovoltaicas. No entanto, uma célula estática possui limitações na captação de energia solar devido à sua imobilidade. Com isso em mente, se acreditava que se a célula se movesse em direção à fonte de energia luminosa, ela poderia gerar mais energia. Assim, os painéis solares devem ser montados em um ângulo de 10 a 15 graus mais latitude do local e se mover em direção ao sol.
Sendo a maioria das aplicações em painéis fixos, na medida em que os raios solares mudam o ângulo de incidência, com o passar do dia, ou mesmo com a mudança das estações do ano, têm-se uma perda significativa na captação dos raios solares.
O principal objetivo da pesquisa é conseguir que a célula fotovoltaica se mova em direção à fonte de maior energia luminosa, convertendo-a em energia elétrica. Além disso, o estudo analisa a viabilidade econômica do dispositivo, optando por um sistema de automação de baixo custo.
Fundamentação teórica
Radiação solar
O aproveitamento mais utilizado para a conversão da energia solar em elétrica é a partir das células fotovoltaicas. Isso por ser uma energia infinita, limpa e silenciosa. Uma problemática quanto a seu uso é a baixa eficiência na conversão da energia – no máximo, 30% dos raios solares são transformados em energia elétrica.
Uma forma de melhorar o aproveitamento da radiação solar deve ser ajustando a placa à posição do painel solar de acordo com a latitude local e o período do ano em que se requer mais energia. No hemisfério sul, por exemplo, um sistema de captação solar fixo deve ser orientado para o Norte, com ângulo de inclinação similar ao da latitude local.
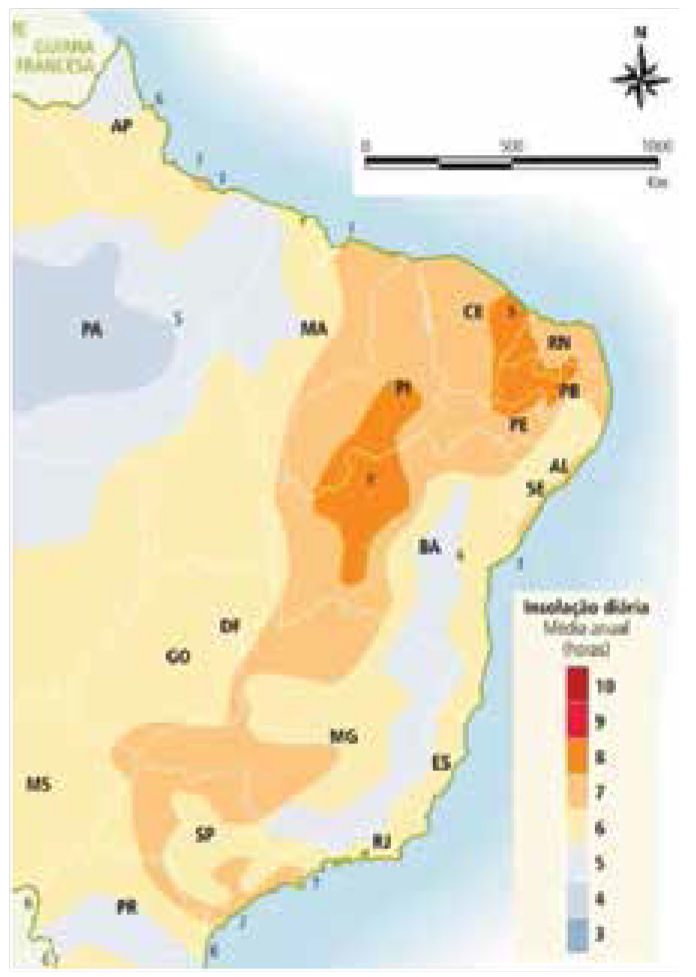 Figura 1 – Mapa solarimétrico do Brasil, região Nordeste. Fonte: Cresesb.
Figura 1 – Mapa solarimétrico do Brasil, região Nordeste. Fonte: Cresesb.
Já na Região Nordeste que apresenta uma cor laranja (Figura 1) tem uma insolação média anual alta, sendo assim, bastante viável à geração de energia solar. A radiação solar atinge a superfície terrestre, devido à reflexão e absorção dos raios solares pela atmosfera. Estima-se que a energia solar incidente sobre a superfície terrestre seja da ordem de 10 mil vezes o consumo energético mundial (Cresesb, 1999).
O Atlas Solarimétrico do Brasil (2000) apresenta uma estimativa da radiação solar incidente no país, resultante da interpolação e extrapolação de dados obtidos em estações solarimétricas distribuídas em vários pontos do território nacional. Devido, porém, ao número relativamente reduzido de estações experimentais e às variações climáticas locais e regionais, o Atlas de Irradiação Solar no Brasil faz estimativas da radiação solar a partir de imagens de satélites. Como pode ser visto, os maiores índices de radiação são observados na região Nordeste, com destaque para o Vale do São Francisco (Cresesb, 1999).
Movimento de rastreamento solar
O dispositivo utilizado para orientação do painel, concentra a energia de forma que o painel esteja sempre voltado para o raio solar, para que haja uma maior incidência de raios perpendiculares à sua superfície. A eficiência do sistema aumenta com a maior incidência dos raios solares.
São considerados paramentos para o deslocamento: declividade terrestre, latitude, ângulo horário, dia do ano, etc. Na maioria dos aplicativos de sistema ativos de acompanhamento, os sensores da placa de sombreamento são suficientes para determinar a posição solares através sistema eletrônico. (Alcântara, 2008).
Movimento em dois eixos para o suporte de painéis fotovoltaicos
O movimento em dois eixos rastreador solar é um dispositivo utilizado para orientar um arranjo de painéis fotovoltaicos, concentradores de energia, de forma que estejam sempre voltados para o Sol, para que haja uma maior incidência de raios solares perpendiculares à sua superfície. Quando têm apenas um eixo, este pode ter orientação polar, norte-sul ou leste oeste. Com dois eixos, um deles é vertical para ajustar o azimute da superfície e o outro é horizontal para ajustar a inclinação dos painéis (Paiva, 2009).
O rastreador em dois eixos tem movimentação azimutal (eixo vertical) e de inclinação (eixo horizontal), o que proporciona um grande rendimento de conversão da componente direta da radiação solar. Um aumento na concentração da irradiação pode ser conseguido com o auxílio de espelhos ou lentes. Os ângulos e a movimentação dos eixos deste sistema são mostrados na Figura 2.
Os ângulos deste modelo são os mesmos. A Equação (1) do ângulo de incidência direta é bastante simplificada devido ao movimento dos eixos horizontal e vertical, fazendo com que o ângulo de incidência direta seja igual a zero. O movimento em torno eixo vertical faz a correção do azimute, com isso, o azimute do coletor solar ficará igual ao azimute do sol.
A intensidade da radiação solar exprime-se, em geral, pelo fluxo de energia, a energia por unidade de tempo (IN) incidente sobre uma superfície plana perpendicular aos raios solares. As unidades no sistema SI são W/m². Se a incidência não for normal, define-se o ângulo de incidência i como sendo o ângulo entre os raios solares, e a normal à superfície (Falcão, Cornwall, 2014).
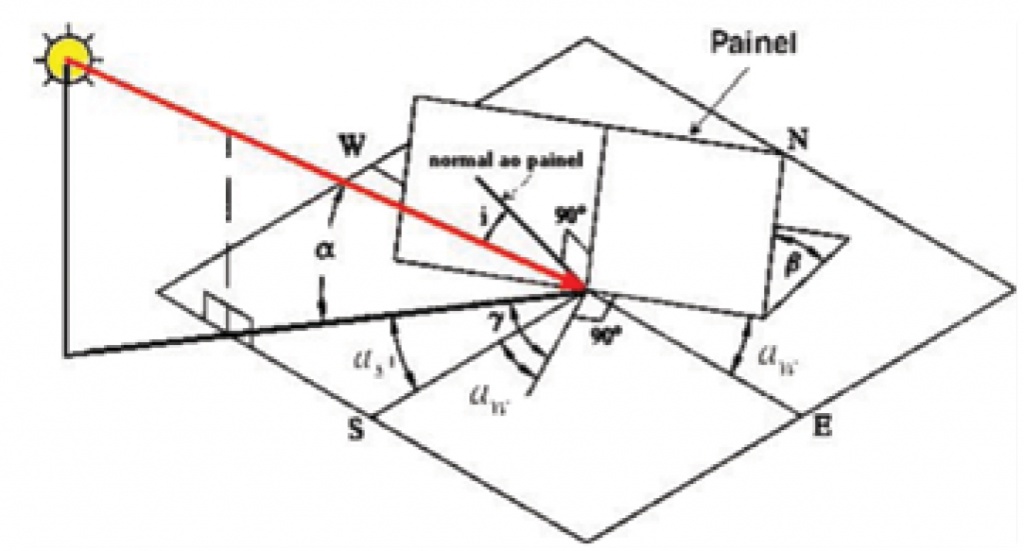 Figura 2 – Incidência da radiação solar, Cornwall (2014).
Figura 2 – Incidência da radiação solar, Cornwall (2014).
com α s > 0, α w < 0 (1)
No caso de incidência não normal (/ ≠ 0), o fluxo de energia recebido pela superfície por unidade de área é Ic = INcos/.
O ângulo de incidência / pode ser relacionado com o ângulo de altitude solar α, com o ângulo de azimute solar α s, e com os dois ângulos que definem a orientação do painel: o ângulo β de inclinação do painel (em relação ao plano horizontal) e o ângulo de azimute do painel α w com Eq. (2) (formado pela direção Sul-Norte com plano horizontal da normal Eq. (3) ao painel; à convenção se sinal para α w é a mesma que para α s). Essa relação é:
cos / = cos α cos (αs – αw) sin β + sin α cos β (2)
No caso de incidência normal:
α s = α w, α = 90 º e | = 0. Se o painel for horizontal, fica β=0 e / = 90 º (3)
A radiação solar é sempre maior em uma área que se estende perpendicularmente em relação aos raios solares, do que em uma área horizontal das mesmas dimensões. Uma vez que o azimute e a altura solar mudam ao longo do dia e do ano, o ângulo de incidência da radiação solar varia constantemente na maior parte das áreas potenciais ao aproveitamento da energia solar. A análise da radiação anual ajuda a equacionar a conveniência das áreas existentes, tendo em conta o seu aproveitamento solar.
A orientação da instalação solar tem por resultado diferentes níveis de irradiação. Em um ângulo de 35º de inclinação, no Brasil, o painel deve estar voltado para o norte geográfico com uma inclinação de 25º a 30º. Neste caso, o nível de irradiação é 15%, maior do que em uma área horizontal (ângulo de inclinação: β = 0) (Falcão, Cornwall, 2014).
Metodologia
O projeto foi dividido em duas partes: a primeira foi o desenvolvimento da parte eletrônica e a segunda do algoritmo. A Figura 3 apresenta um resumo do projeto.
 Figura 3 – Diagrama representativo do sistema embarcado.
Figura 3 – Diagrama representativo do sistema embarcado.
A proposta de implementação com a montagem e também de prática aplicação para futuros projetos, foram pesquisados produtos de fácil acesso no mercado. Para esta fase inicial, foram utilizados quatro sensores (5mm) LDR, quatro resistores de 460 Ω(Ohm), +/- 5%, são cabos com ponteiras específicas para o uso de microcontrolador (Arduino UNO) e dois servomotores 9G (modelo ser-gls09).
São dois servomotores, um para cada eixo cardeal. O movimento do painel em torno do eixo vertical é proporcional à diferença entre a irradiância útil recebida pelos quatro sensores da placa de sombreamento norte/sul e leste/oeste. As saídas são as variáveis utilizadas pelo microcontrolador para a realização do controle dos movimentos em torno dos eixos vertical (azimute) e horizontal (elevação).
A Figura 4 ilustra o sistema eletromecânico utilizado que proporciona o encontro do sol perpendicular e igualitariamente a superfície de cada um dos sensores. Os materiais utilizados são: (A) uma chapa de alumínio quadrada medindo 150,5 mm de cada lado e espessura de 2 mm, uma caixa de luz 4×4 e uma chapa de alumínio quadrada com dimensões de 14,4 mm de cada lado, para o suporte do painel; (B) um perfil tubular do tipo quadrado de alumínio com dimensão de 260 mm e/ou 1.1/32 polegada e 2 mm espessura em (C) um servomotor que pesa 9g foi colocado dentro do tubo para proporcionar o movimento em direção ao sol; e (D) um perfil tubular do tipo redondo de alumínio com dimensão de 3 mm e/ou 1/8 polegada foi utilizado para montar o suporte vertical garantindo, assim, a estabilidade do sistema.
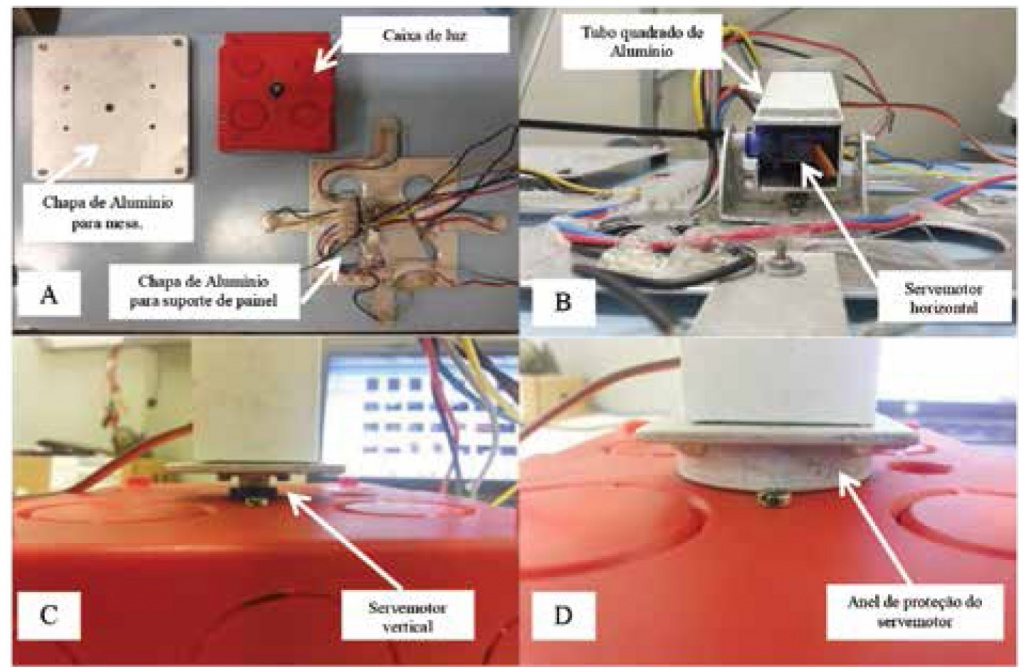 Figura 4 – Visão geral da implementação de um painel fotovoltaico.
Figura 4 – Visão geral da implementação de um painel fotovoltaico.
Geralmente, o dispositivo interfere no funcionamento do controle para que o componente se movimente junto e, assim, o ângulo de incidência dos raios solares sobre a superfície do painel seja o mesmo sobre a superfície do sensor.
Microcontrolador
O microcontrolador Arduino parte do conceito de hardware e software livre e está aberto para uso e contribuição de toda a sociedade. A versão do hardware utilizado no projeto é o Arduino R3 – ATmega328. Este conta com 14 Pinos E/S digitais que podem ser usados como saídas PWM (Pulse-Width Modulation); seis pinos com entrada analógica e memória flash 32 kb utilizada no projeto.
O Arduino também é responsável pelo controle do servomotor nas direções horizontais e verticais, que é uma máquina de sistema eletromecânico para controle de rastreamento que executa um movimento de acordo com o comando específico, verificando sua atual posição pelo sol e chegando até o local desejado, diferentemente dos servomotores de rotação contínua.
 Figura 5 – Placa de microcontrolador – Arduino.
Figura 5 – Placa de microcontrolador – Arduino.
Estrutura do dispositivo
A Figura 6 ilustra o dispositivo de bancada desenvolvido, os principais componentes utilizados (LDRs, Arduino e servomotores) e para proporcionar sustentação ao sistema utilizou-se uma caixa de luz com 40 mm em cada lado, material escolhido por conta da sua grande facilidade de manipulação, não necessitando de soldas ou equipamentos especiais. Para este tamanho, o dispositivo apresentou-se muito estável, suportando o peso do painel fotovoltaico com a vantagem de ser barato e reciclável. As dimensões finais são: comprimento de 250 mm em cada lado e altura de 160 mm.
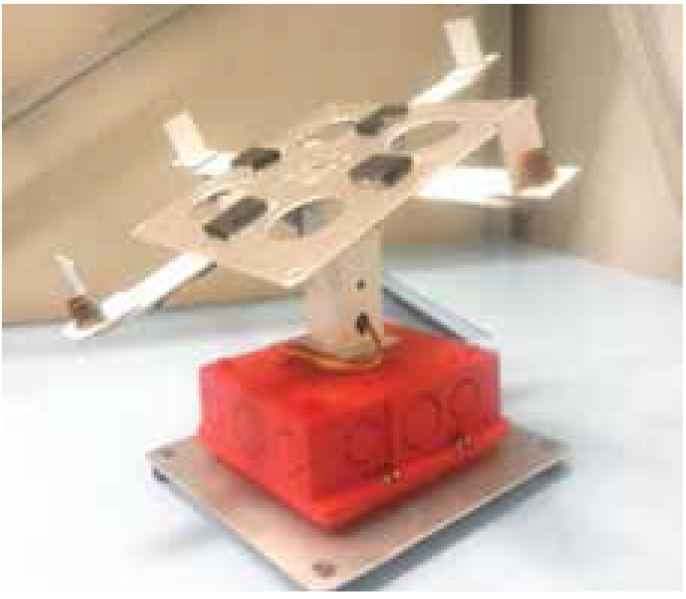 Figura 6 – Versão do dispositivo.
Figura 6 – Versão do dispositivo.
A Figura 7 apresenta as especificações do servomotor vertical e horizontal para proporcionar a redução da velocidade: 0,12 seg/60 graus, a fim de fornecer um torque suficiente para a aplicação. É similar ao motor vertical e sua rotação de torque de 4,8 V.
 Figura 7 – Micro servomotor 9 G.
Figura 7 – Micro servomotor 9 G.
Programação em C
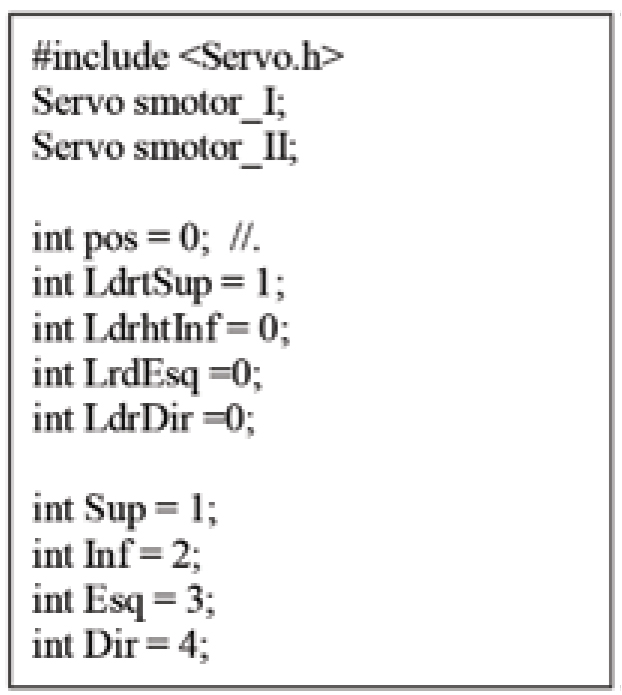
A programação do microcontrolador foi feita com a utilização da linguagem de programação da plataforma de desenvolvimento do Arduino. Trata-se de uma linguagem base em C\C++. O diagrama de fluxo mostrado nos códigos 1, 2 e 3. Ao iniciar a execução do código, é feita uma leitura nas portas analógicas 0 e 1, onde está conectado o sensor que identifica a posição do sol. Nesta leitura, são obtidos os valores que podem variar entre 0 e 1023, de acordo com a tensão sobre os LDRs.
O fluxograma 1 é a biblioteca que nos permite controlar tão facilmente os servos <Servo.h> smotor_I, que possui vários parâmetros de controle para servomotores.
 Fluxograma 1 – Linguagem em C controlar de servomotor.
Fluxograma 1 – Linguagem em C controlar de servomotor.
O código fonte permite o controle do movimento de inclinação do dispositivo com limite de considerável de 90º, verificou se esquerda, se mover para a direta, apesar de apresentar certa instabilidade em alguns momentos, podendo ser modificado para alcançar o resultado desejado.
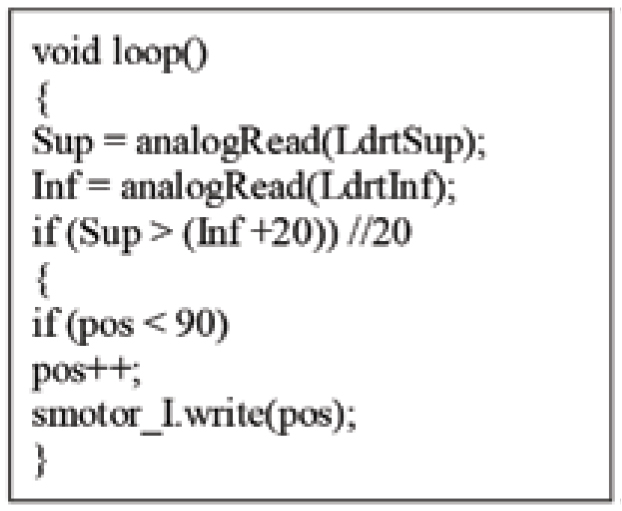 Fluxograma 2 – Linguagem em C controlar de servomotor Norte/Sul.
Fluxograma 2 – Linguagem em C controlar de servomotor Norte/Sul.
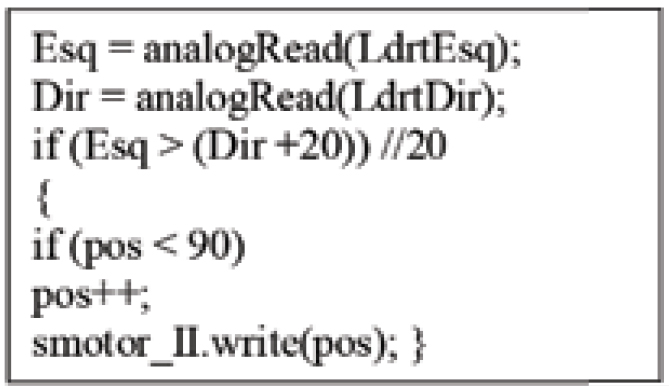 Fluxograma 3 – Linguagem em C controlar de servomotor Leste/Oeste.
Fluxograma 3 – Linguagem em C controlar de servomotor Leste/Oeste.
O código fonte seria um algoritmo que, ao identificar um baixo nível de sensor da placa de sombreamento indicando o anoitecer, retomasse a posição máxima de inclinação, voltando normalmente o painel à direção do sol para o dia inteiro. O código fonte poderia também conter instruções de automaticamente parada, move durante a noite, quando amanhecer, voltando a funcionar ao visto que o código atual continua analisando o ambiente mesmo em completa ausência de luz.
Conclusões
A presente pesquisa, que utilizou um microcontrolador e materiais de baixo custo para conservar o caráter simples e versátil do equipamento, conclui que o produto é inovador quanto aos materiais usados para gerar o sensoriamento solar.
Ainda é preciso melhorar os parâmetros adotados e, continuamente, a busca por um deslocamento mais próximo ao do sol possível, através de algoritmos de rastreáveis do tipo lógica nebulosa. As principais condicionantes do projeto foram de baixo custo (houve redução de, em média, 30% do valor quando comparado a um modelo similar vendido no mercado) e ainda pequeno consumo de energia.
Referências
*Isaac Péricles Maia de Medeiros é graduado em Sistemas de Informação e possui mestrado em Engenharia Mecânica pelo PPgEM-UFRN (2016).
Francisco de Assis Oliveira Fontes é engenheiro mecânico, com mestrado em Engenharia Mecânica e doutorado em Engenharia Química. É professor associado do Departamento de Engenharia Mecânica da Universidade Federal do Rio Grande do Norte (UFRN).
Carlos Magno de Lima possui graduação e mestrado em Engenharia Mecânica e doutorado em Engenharia Elétrica e de Computação pela UFRN. É professor adjunto do Departamento de Engenharia Mecânica da UFRN.
Cleiton Rubens Barbosa Formiga é engenheiro mecânico, com especialização em Segurança do Trabalho, mestrado e doutorado em Engenharia Mecânica. É professor titular do Departamento de Engenharia Mecânica da UFRN.
Samara Melo Valcacer é graduada em Tecnologia em Materiais/Fabricação Mecânica e mestra em Ciências e Engenharia de Materiais. É professora EBTT do Instituto Federal de Educação, Ciência e Tecnologia de Mato Grosso do Sul – Campus Corumbá.





Respostas de 2
Muito interessante!!! Sustentável!!!! Belíssimo projeto,aos olhos de quem visa a eficiência com recursos de fácil alcance.
Estão de parabéns!!!!
gostei bastante do projeto,tenho pesquisas nessa área. gostaria de saber o consumo de energia do sistema que você falou ser baixo. Também saber quanto de área a mais esse sistema usaria, pois o movimento requeria o afastamento em todas as direções. e a diferença de geração e valor em relação a um sistema convencional ocupando o mesmo espaço com placas voltadas para o norte. em todo caso segue meu contato caso queira trocar experiencias e resultados.